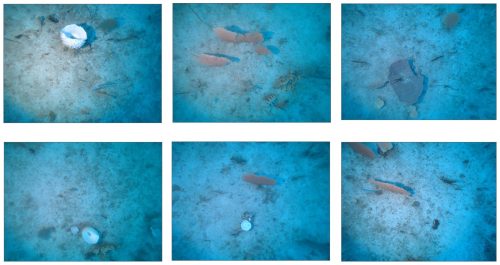
Inshore benthic habitats are relatively easy to access and describe using methods such as dive surveys, installed in-situ instrumentation (e.g. Baited Remote Underwater Video Systems – BRUVS), or vessel-based systems (e.g. drop cameras, towed video or Remotely Operated Vehicles – ROV). Capturing such data in offshore and deeper environments however is vastly more complex in its nature and significantly more expensive.
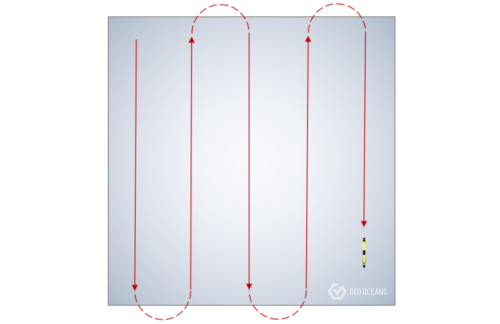
Geo Oceans have solved this problem recently for a major energy client with the deployment of low-cost and low-logistic Autonomous Underwater Vehicles (AUV) for the near-bed capture of benthic habitats to satisfy a regulatory requirement across 50 sites in Western Australia.